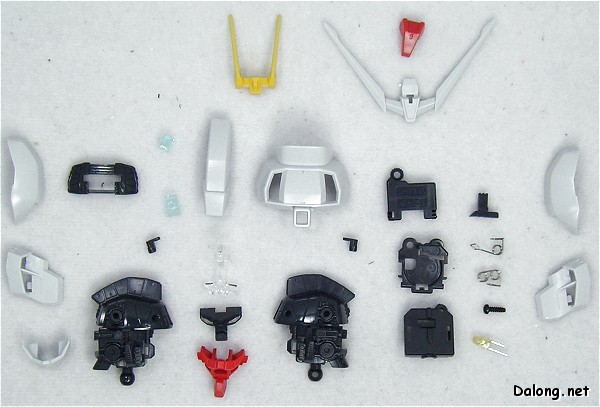
머리
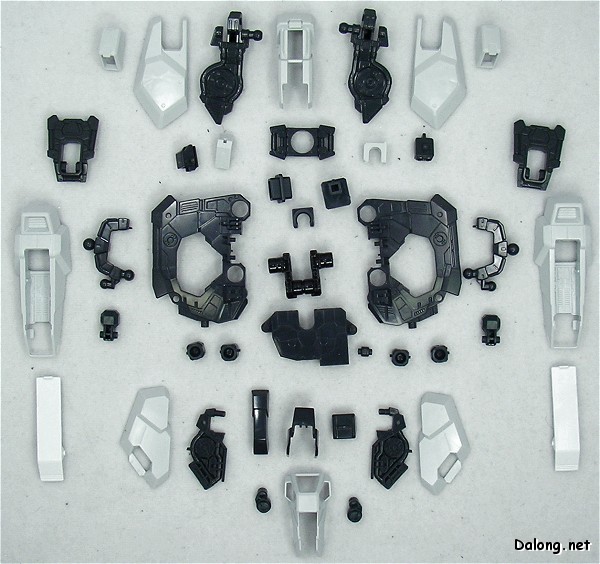
부품도

내부
프레임과 외장 장갑들. 조립과 해체가 비교적 쉽게 되어 있습니다.
but,
윙제커와 마찬가지로 해치 오픈이 전혀 안됩니다.
ㅠ.ㅠ
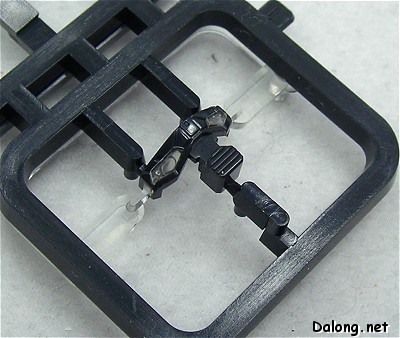
카메라
아이 부분은 다른 몇몇 PG들처럼
시스템 인서트 식으로 2색조합사출되어
있습니다.

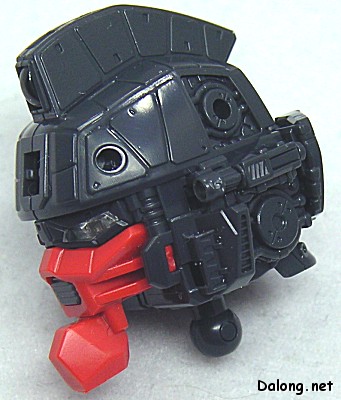
머리통
전면



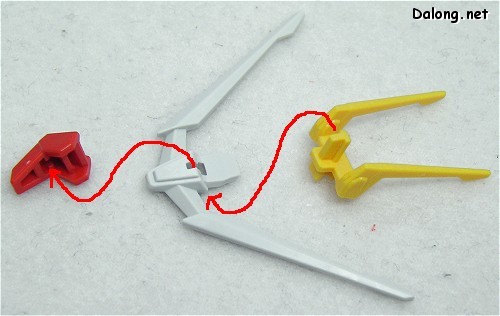
머리
뿔부분의 조합이 다소 특이합니다.
노란색 뿔의 가운데 핀이 하얀색을
관통하고, 빨간색에 꽂힙니다.
그래서
아예 뿔을 미리 조합하고 머리에 붙이게 되어 있습니다.
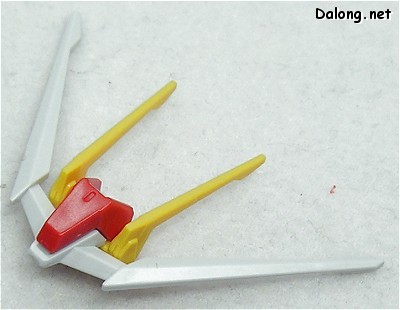
통상 머리구멍에
하나씩 덧붙여달던 방식에선 안테나가 잘 떨어지는 경우가 많았는데,
이렇게
일체형으로 다 몰아붙이니 따로따로 떨어지지는 않습니다. (그럼 통채로
떨어지나..?;;)

머리
내부 프레임 전면
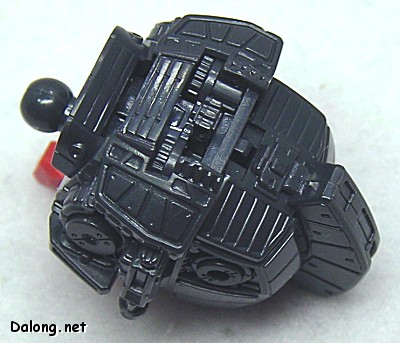
머리
내부 프레임 후면. 디테일이 상당히 복잡하죠.
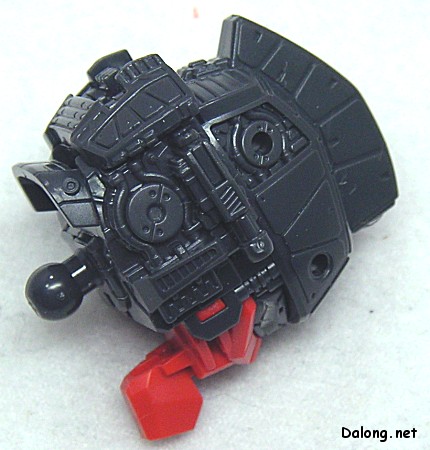
측면
뒷부분의 디테일은 자세히보면 상당한 수준입니다.
역대 PG중 가장
정교한 머리통 몰드.
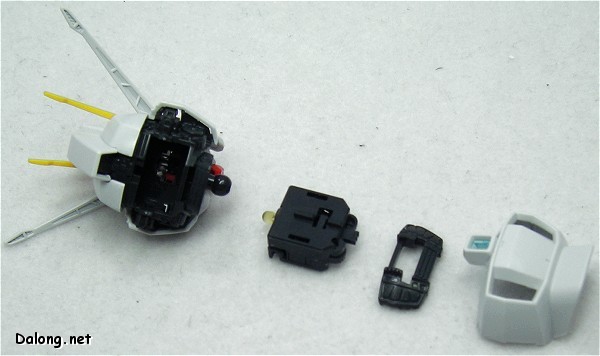
뒤통수를 따고, 내부프레임 하나를 들어내야 수은전지 블록을 뺄 수
있습니다.

수은
전지 블록은 나사로 고정되는데, PG 스트라이크 중 유일하게 나사가
쓰이는 부분입니다;;
관절이나 프레임에는 나사를 전혀 안쓰고 있습니다요.

수은
전지는 CR1220 1개를 사용합니다.
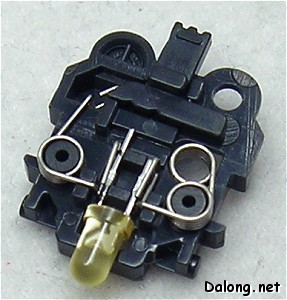
LED
블록의 구성도는 위와 같으며, LED가 매우 짧고 부품도 작습니다.
다른
PG들에 비해 구성이 간단하고 조립도 쉽다는 장점이 있습니다.

LED
ON!
머리꼭대기와 눈 부분에 불이 들어오긴 하지만, 조금 어둡단
생각이 듭니다요.

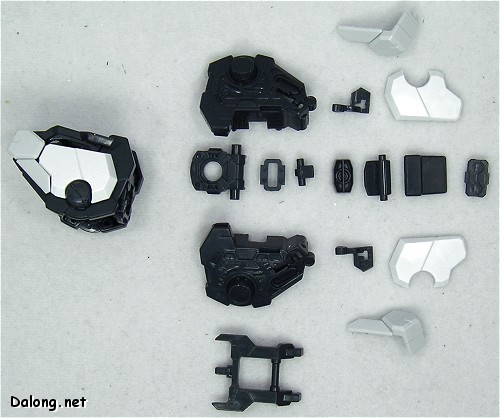
몸통
상부의 부품도
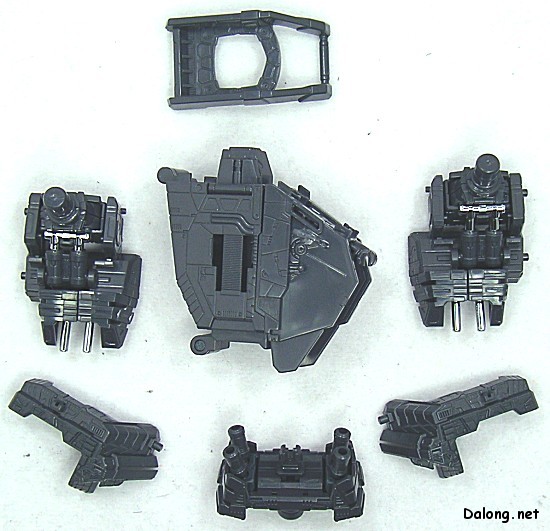
몸통
하부의 부품도




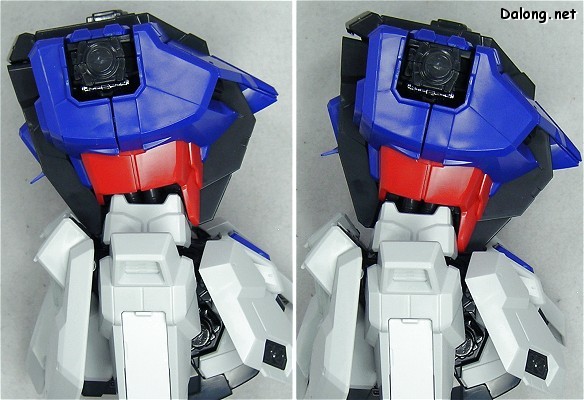
콕핏
해치오픈
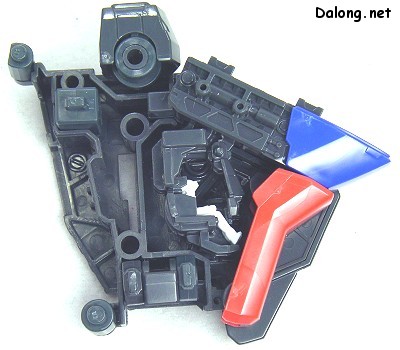
콕핏
해치오픈 구조는 매우 시스템적입니다. 몸체 내부에 수납된 상태.
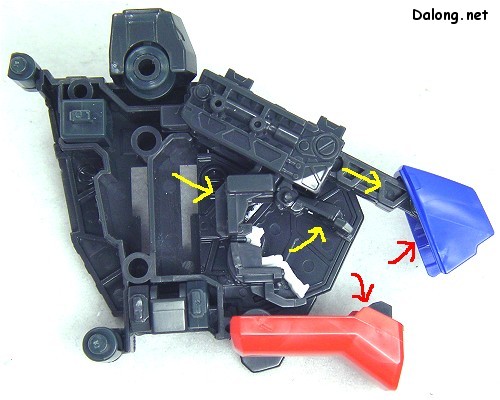
위쪽의
파란 콕핏 뚜껑을 열면서 앞으로 당기면, 콕핏트가 함께 딸려서 앞으로
밀려 내려옵니다.
이때 콕핏 앞의 모니터 화면도 자동으로 위로 올려지면서
파일롯이 내리고 탈 수 있게 됩니다.
역시 PG답게 별별 군데에 신경을
다 써두었습니다.
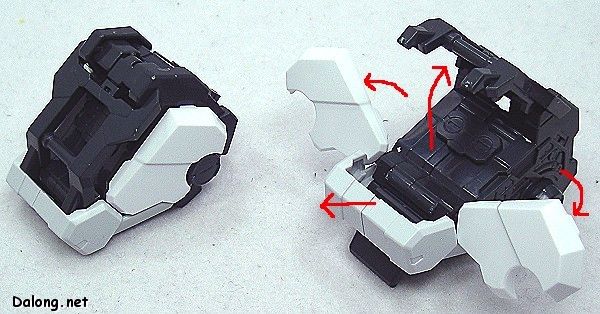
몸체에
해치 오픈이 따로 없긴 한데, 가슴장갑이 앞으로 슬라이드 되면서 약간
열리는 시늉을 합니다.
전혀 없는 것보단 나은 정도? ^^;

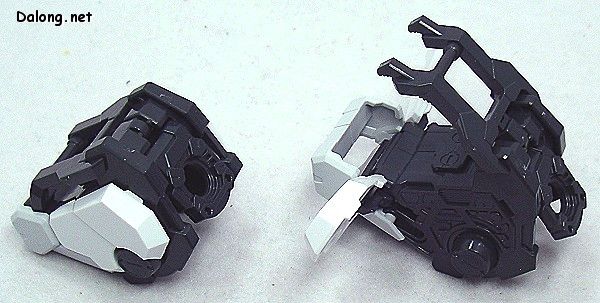
어깨
관절은 앞뒤 위아래로 자유자재 가동. MG도 이정도는 되죠.

옆구리가
일부러 벌어지게 만들어져 있어서, 내부 실린더가 슬쩍 보입니다.
옆구리에
아머슈나이더를 수납하는 부분. 수납뚜껑만 순백색 런너의 부품입니다.

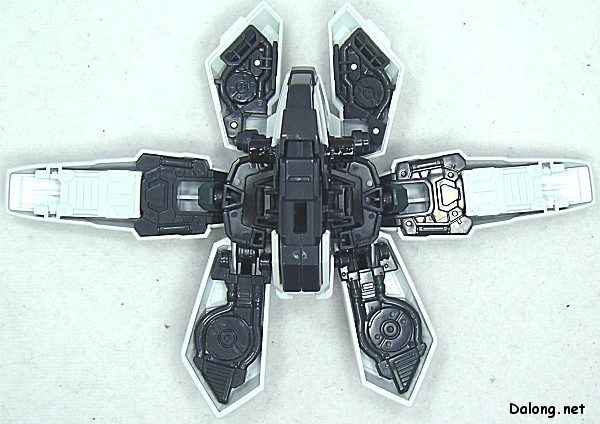
뒷부분을
밑에서 바라본 모습
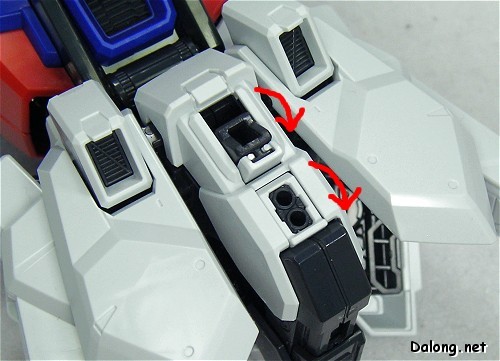
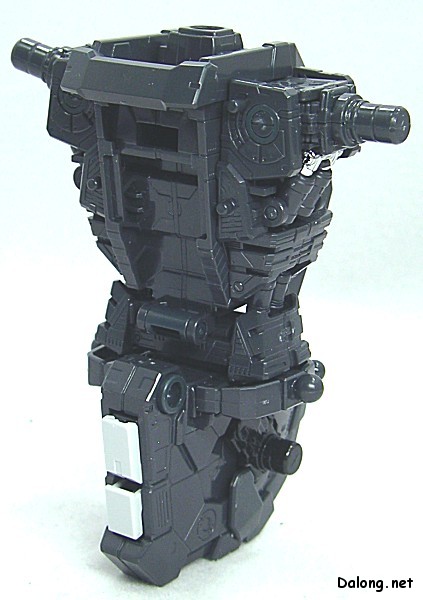
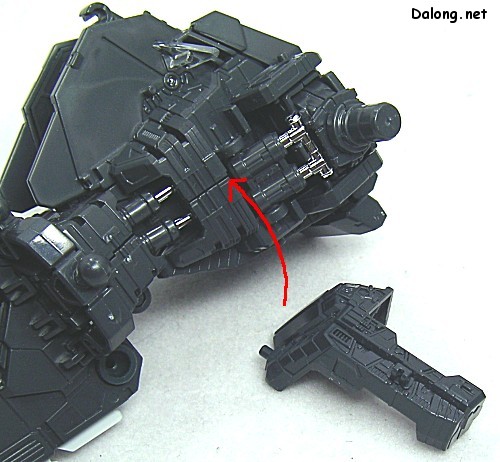
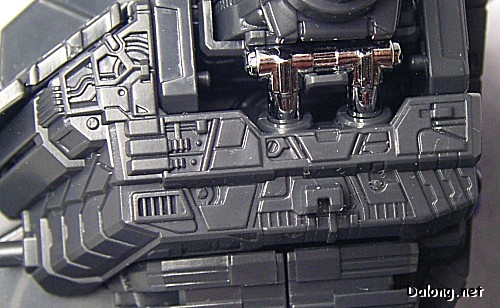
궁디
뒷부분에는 두 개의 개별적인 오픈부위가 있습니다.
위쪽은 무기를
걸어놓는 홈인데, 아래는..??
마치 에너지를 충전하는 코드를 꼽는
자리 같은데, 그렇다면 나중에 에너지 코드가 달린 발사대가 나오려나?!?

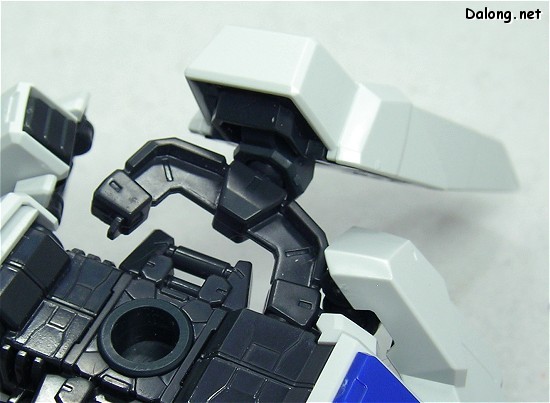
향후
에일팩 등의 백팩류를 꽂기 위한 폴리캡 자리가 만들어져 있습니다.
평소엔
닫혀있다가 꽂을 때만 살짝 열게 함으로써, 평소엔 가려둘 수 있습니다.
세심하군!
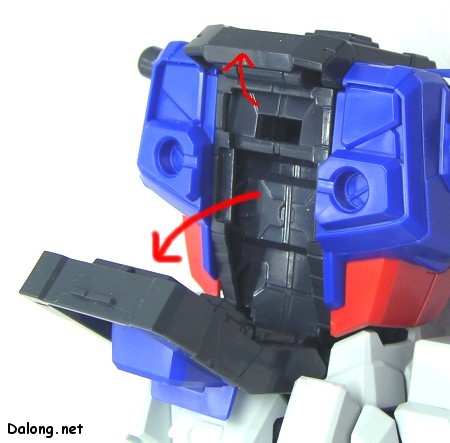
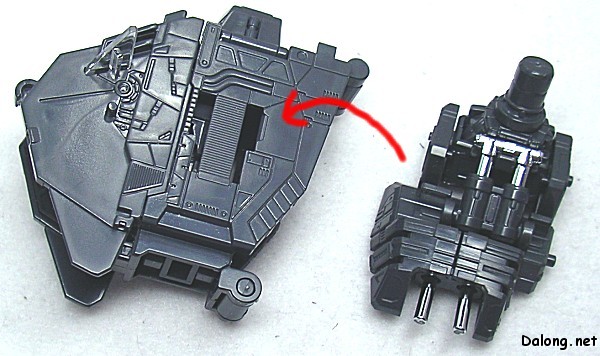
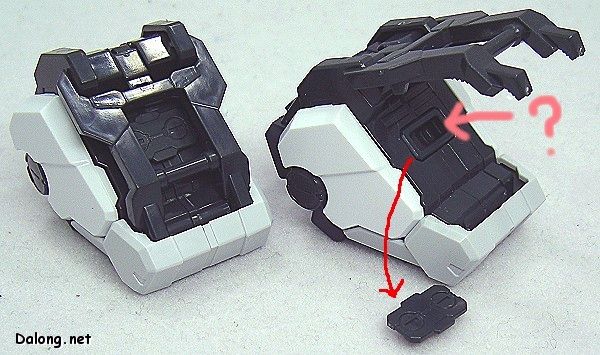
그런데
특이한 부분. 뒷뚜껑이 통채로 열리게 되어 있습니다.
무슨 용도인지
언뜻 봐선 이해가 가지 않습니다.

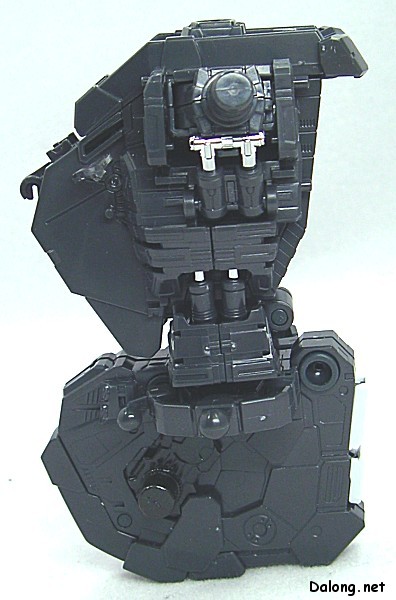
뒷뚜껑
안쪽 디테일도 만만치 않습니다.
향후에 뭔가 수납하려는 듯 한데,
설마 스트라이크 대거처럼 건 바렐을 등에 꽂으려는 건 아니겠지;;
아니면
발매예정인 스카이 글래스퍼를 등에 지고 다니거나..
어쨌든 의도가
심히 수상한 개폐구입니다.

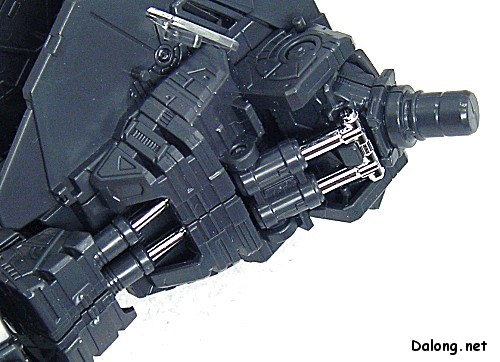
허리는
살짝 옆으로 가동됩니다.
앞뒤로도
허리가 가동. 그에 따라 실린더 기믹도 움직입니다.
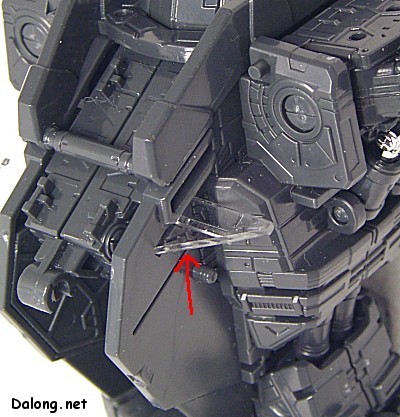
스커트
내부 몰딩이 상당히 훌륭합니다.

앞스커트는
이중 관절의 폴리캡으로 연결되어 있어서, 가동범위가 큽니다.
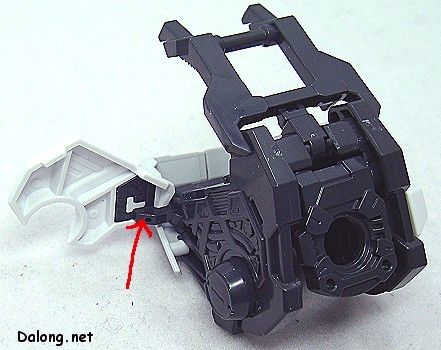
옆구리
장갑을 연결하는 C형 부품은 고정된 것이 아니라 저렇게 위아래로도
자유자재로 움직입니다.
밑에서
보면 그 동작이 더 자세히 보이는데,
옆구리랑 앞쪽 스커트 아머가
C자형 부품에 함께 붙어있고,
그 C자형 고정부는 앞쪽만 몸체에
연결되어 있습니다.
이런 특이한 구조로 인해 다리가 마구 움직여도
스커트가 이리저리 피해다닐 수 있어서,
결과적으로 다리의 가동성을
훨씬 더 극대화시켜줍니다.

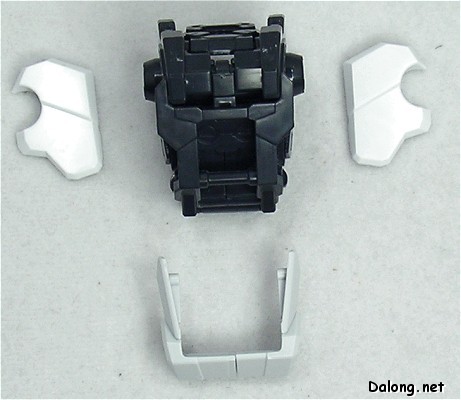
외장
장갑을 죄다 뜯어낸 모습

내부
프레임
어깨
아래, 옆구리엔 각각 멕기 실린더가 가동됩니다.
가슴덕트부에는
클리어 파츠를 사용하고 있습니다만. 만들고나면 거의 안보입니다 >.<
어깨
실린더 프레임 위쪽에는 내부 프레임을 한겹 더 붙이게 되어 있습니다.
어깨
아래쪽 메카닉 프레임의 몰드. 직접 보면 그 정교함이 장난이 아닙니다
;;
몸통
상부의 내부 프레임은 여러 블록의 조합으로 구성되도록 되어 있습니다.
몸통의
코어에 양쪽 팔과 폐에 해당하는 부위의 블록을 붙이게 되어 있는데,
이
때문에 몸통 코어 옆면의 쌔끈한 몰드가 가려지게 되는 점은 유감입니다
>.<

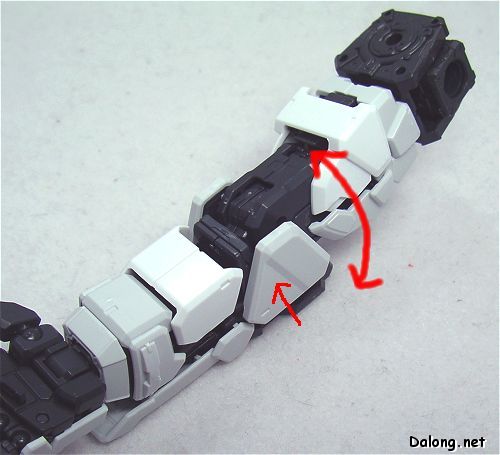
위의
사진은 허리의 위와 아래의 연결부입니다.
몸통 역시 다리와 마찬가지로,
나사를 안쓰는 대신
폴리캡과 톱니바퀴+프라스틱의 마찰에 의존하는
관절부위가 많습니다.
역시 폴리캡과 톱니바퀴의 마찰을 동시에
이용하기 때문에 상당히 튼튼합니다.
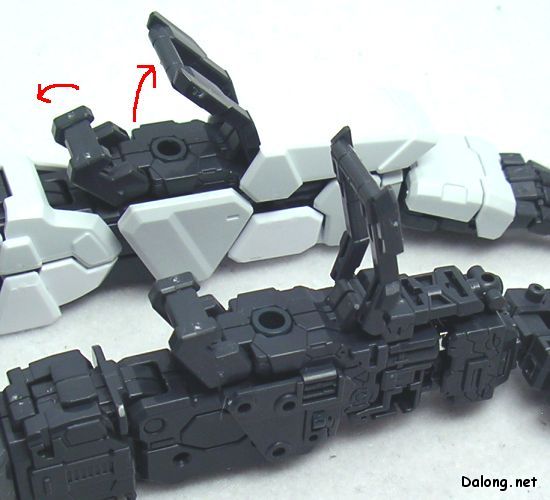
어깨
연결부 역시, 두가지를 혼용하게 되어 있습니다.
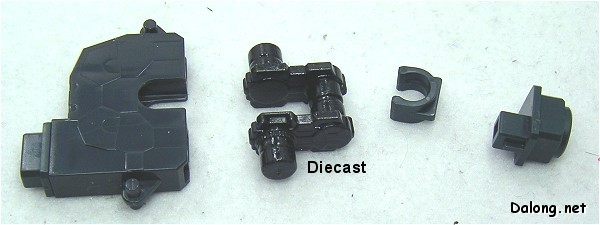
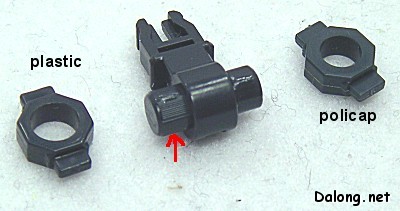
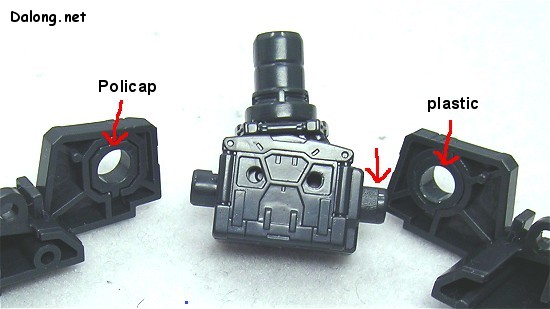
몸체와
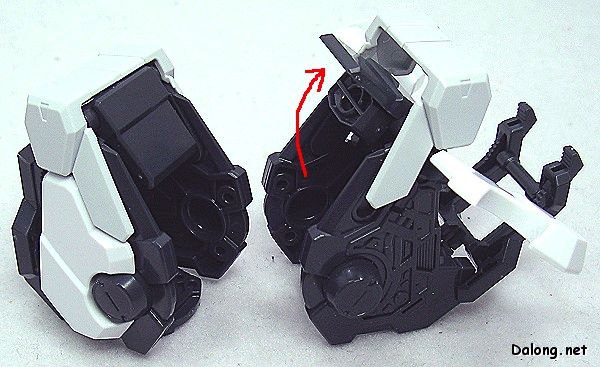
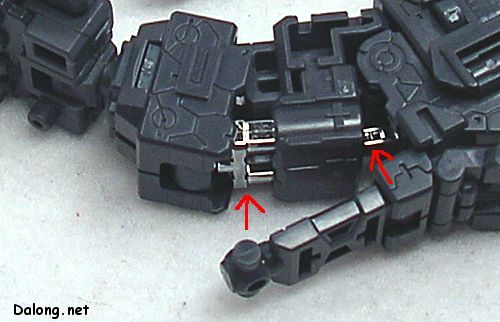
다리를 연결하는 엉치 부위는 튼튼하고 묵직한 다이캐스트 부품이 사용됩니다.
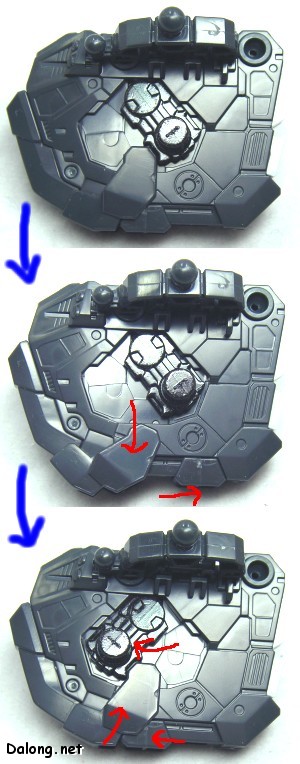
다이캐스트의
고정방식이 두가지입니다.
평소엔 맨 위 사진처럼 뒤쪽에 고정해두다가,
아래쪽의 수평고정핀을 뒤로 밀고,
다이캐스트의 위치를 고정하는
핀을 아래로 내리면 다이캐스트의 방향을 45도 앞쪽으로 돌릴 수 있습니다.
그 후엔 역순으로 이중으로 고정핀을 잠그게 됩니다.
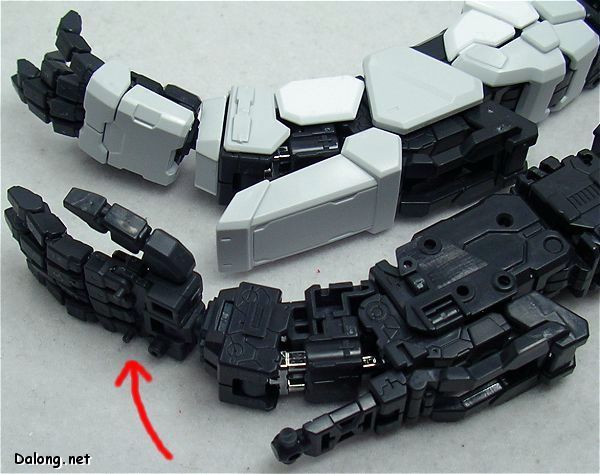
이렇게
다리 연결부를 조정함으로써, 쪼그려 앉기 등의 자세를 좀더 자연스럽게
구현할 수 있게 됩니다.

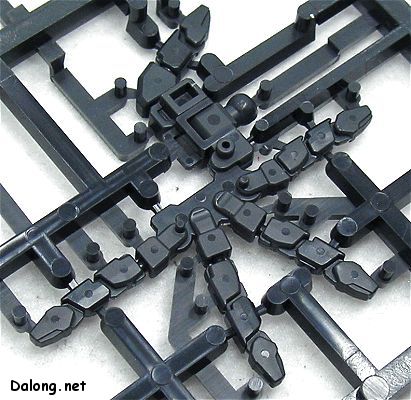
팔
부품도
어깨
부품도

어깨만
따로 봐도 상당히 걸작입니다.
대략
외장 장갑은 3가지로 분리가 됩니다.

내부
프레임. 조금 투박한 느낌이 듭니다.
어깨의
해치 오픈. 앞뒤로 열리고, 옆으로 빠지고 위로 올려지고.. 화려한 편입니다.
어깨밑부분도
해치 오픈 시 들어 올릴 수 있습니다.
어깨앞뒤쪽
해치오픈부위의 고정은 좀 약합니다.
해치가 잘 떨어지는 PG의 전통은
계속 이어지는 듯 -_-;;
세게 잘 끼우면 뭐 그럭저럭 쉽게 떨어지진
않는데, 해치를 오픈할 때 살살 열어야 합니다.
어깨
윗부분에 엄한 폴리캡 구멍이 있습니다. 평소엔 덮개로 가려둡니다만..
이는
필시 PG전용 소드나 런쳐의 어깨무장을 고정하기 위한 용도로 보여집니다만.
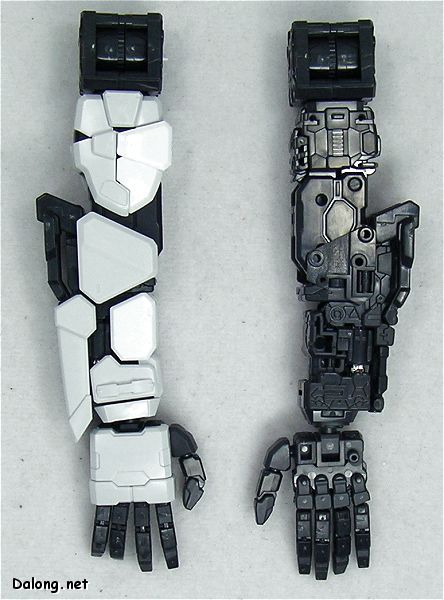
팔부분.
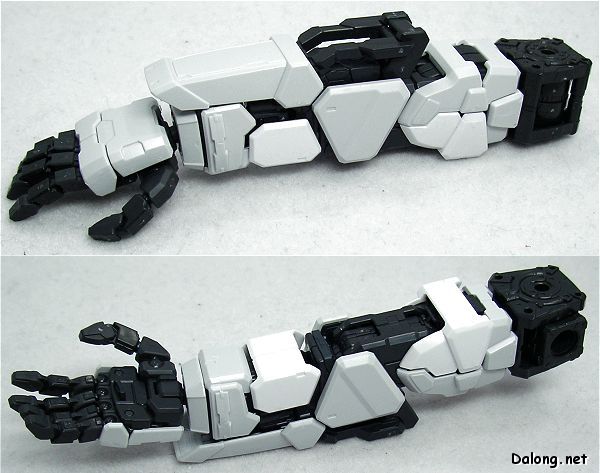
조각조각
분할된 흰색과 회색 장갑의 조화가 처음엔 좀 어색해보이는데, 보다보면
괜찮습니다.
오히려 입체감이 더 두드러져 보이는듯..
가동성이야
당연히 완전접힘.
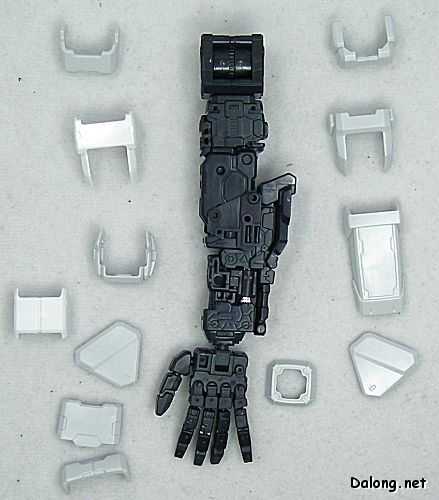
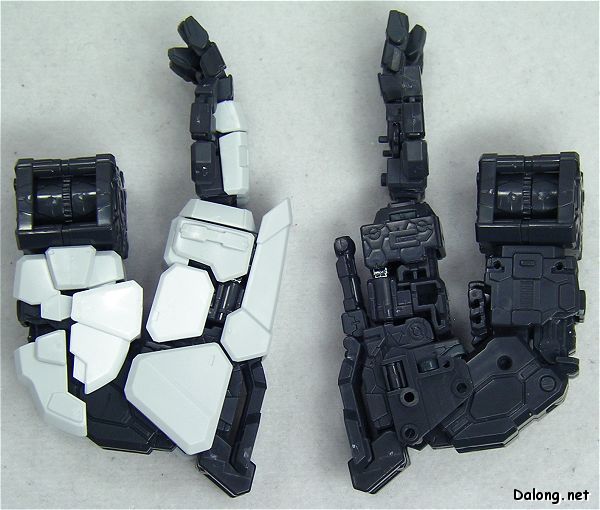
내부
프레임과 외장 장갑들. 팔에는 해치오픈이 없습니다. ㅠ.ㅠ
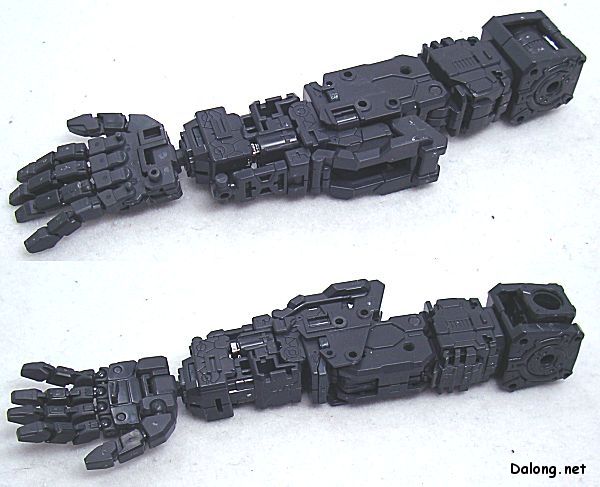
내부
프레임. 디테일이 섬세한 편입니다.

팔꿈치
관절에 실린더가 전혀 없습니다. 아마도 슬라이드 장갑 때문인 듯 한데,
약간은 아쉬운 부분.
대신
팔뚝의 가동부위에 맥기 실린더가 2개 있습니다.
팔뚝은
저렇게 안쪽으로 이중으로 접혀들어갈 수 있게도 되어 있습니다.
팔뚝에
쉴드를 수납하기 위해 양쪽으로 고정부가 벌어집니다.
향후 소드
스트라이크 등의 병장을 장착할 때도 사용될 듯.
팔뚝이
수평으로도 회전하는데, 그에 따라 삼각형 모양의 장갑이 살짝 비틀리며
따라가 줍니다.
삼각형 장갑은 고정된 것이 아니라, 한쪽에 고리로
걸려있고 두 개가 폴리부품으로 연동되도록 되어 있습니다.
가동되는
폭은 매우 좁지만, 상당히 '인간적인' 가동을 보여주는 한 예입니다.
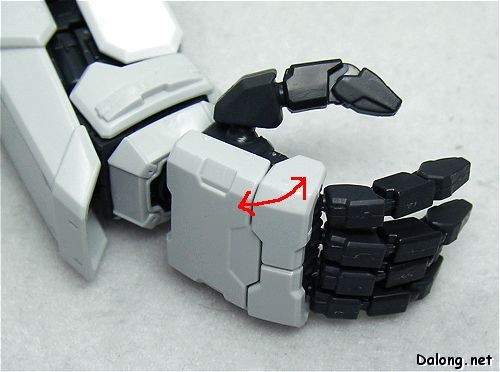
손등
장갑역시 두 개로 분할되어 있어서, 손가락을 움직일 때 아주 약간씩
가동합니다.
정말이지 별의 별곳의 장갑을 다 분할해놓고 제각기
움직이는 시스템입니다요.
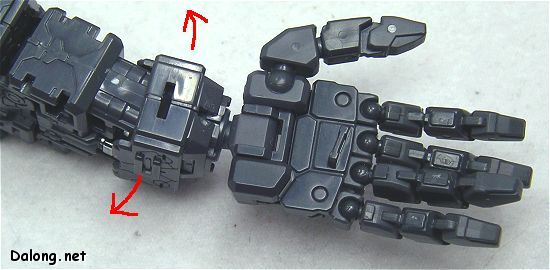
손목도
내부에서 앞뒤로도 가동. (도대체 가동이 안되는 부분이 어디야?!)
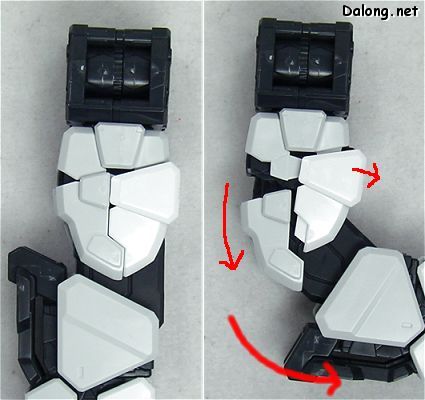
알통장갑의
슬라이드 기믹.
통상 다리에나 쓰이는 슬라이드 기믹이 팔에도 구현되었습니다.
팔꿈치를
접으면 알통 뒷부분 장갑은 슬라이드 되어 내려오고,
앞쪽 장갑은
자동으로 살짝 앞으로 돌출되게 되어 있습니다. (움직이는 공간을 조금
더 확보)
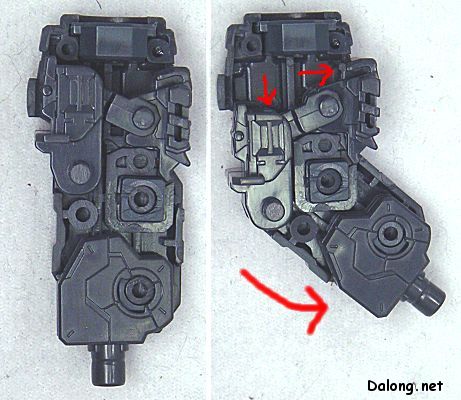
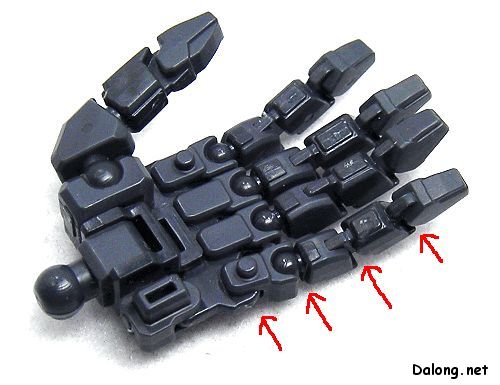
알통장갑의
내부구조를 보면.. 저런식으로 연동됩니다.
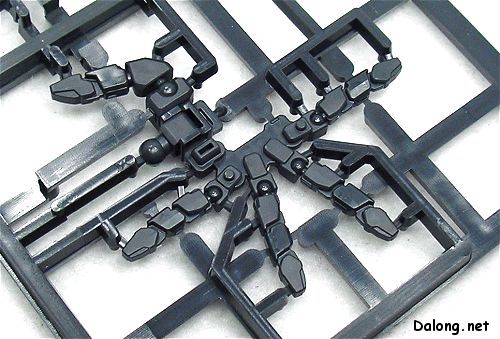
PG
스트라이크에서 확깨는 포인트 중 하나, 울트라 다관절 통짜부품 손가락입니다.
무려 30개나
되는 게이트로 구성된 사상초유의 통짜부품입니다요.
뒷면은
금형에서 부품을 밀어낸 자국이 조금 심한편입니다..;;;

런너에서
떼고 난후 다듬는 일도 노가다...
그리고 떼어내고 난 후는 모양새가
좀 이상하죠?
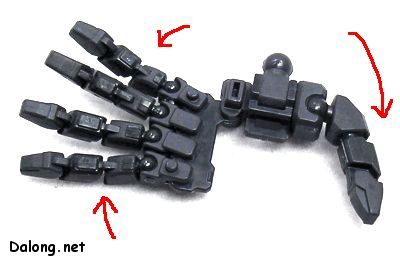
우선
네 손가락을 모으고.. 엄지손가락을 180도 회전한후,
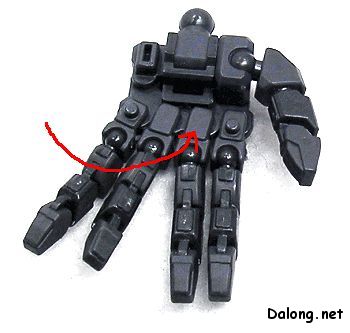
이렇게
끼워서 그대로 손모양 하나가 완성되 버립니다.
멋지긴 한데 굳이
저렇게 까지 복잡한 통짜부품으로 할 필요가 있었을까? 흠...
마치
인간의 손처럼, 손가락 안쪽에도 움직이는 부분이 있어서
손가락마다
총 4개의 관절이 존재합니다. 경이적인 손가락..

저놈의 완전가동 손가락은 역시 PG의 매력포인트!
관절도 충분히
뻑뻑해서 헐겁거나 빠지지 않습니다.

다리
부품도

발
부품도

PG
스트라이크 다리에는 나사가 하나도 없습니다. 그래도 가동은 충분히
뻑뻑한데, 그 이유는...
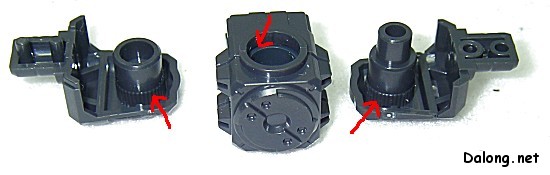
엉치뼈
연결부위. 내부에 폴리캡도 있고, 양쪽 구멍에 꽂히는 핀 자체에
톱니바퀴모양의
돌기가 있어서 마찰을 일으킴으로써, 쉽게 헐렁거리지 않게 되어 있습니다.
무릎
연결부위. 역시 폴리캡+톱니형 마찰을 동시에 이용하여 튼튼합니다.

발목부의
경우도 마찬가지. 한쪽은 폴리캡으로 고정하고, 나머지 한쪽의 톱니돌기에는
프라스틱
부품으로 강하게 고정하게 되어 있습니다.
이런
식으로 대여섯 군데의 중요 포인트가 모두 폴리캡+톱니나사식 가동구조라서,
심하게
뻑뻑하지 않으면서도 고정이 잘 되는 절묘한 방식을 취하고 있습니다.

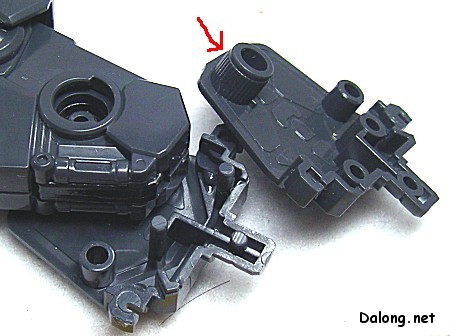
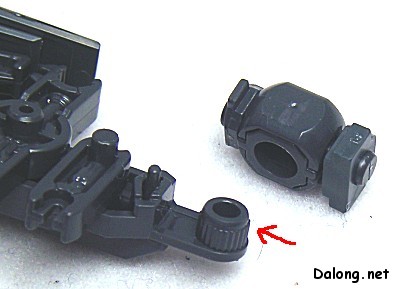
다리의
중심에는 다이캐스트 부품이 쓰이죠.
다이캐스트는
무릎의 이중 관절부 안쪽에 넣게 되어 있습니다.
무게중심을 잡고,
가동에 힘을 많이 받는 부위의 강도를 증가시키기 위한 것입니다.

내부
프레임 & 외부 장갑
무릎
부분의 양옆에는 메카닉 프레임 아래에 또 프레임이 있습니다.
메카닉
프레임을 완성하면 정말로 안보이는 곳인디.. 장인정신입니다요.

내부
프레임 Vs. 장갑이 무장된 다리
(프레임의 윤곽을 더 잘보이게 하기
위해 명암처리를 다르게 하였습니다)

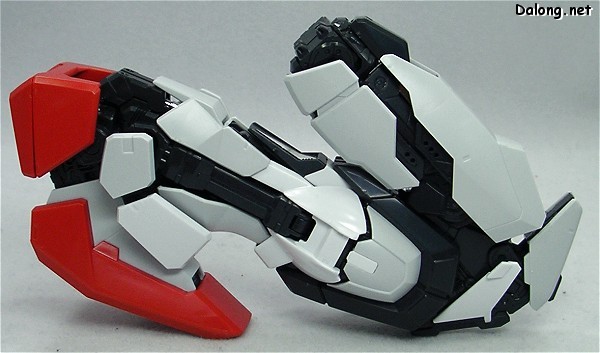
무시무시한
가동률.

프레임
상태의 가동한계. 저정도면 갈 데까지 간 가동성입니다.
장갑을
입힌 이후의 완전가동. 장갑들로 인해 발목이 약~간 덜 꺾이지만, 나머지는
그대로 구현.

내부
프레임에는 허벅지와 발뒤꿈치에 작은 멕기 실린더가 보입니다.

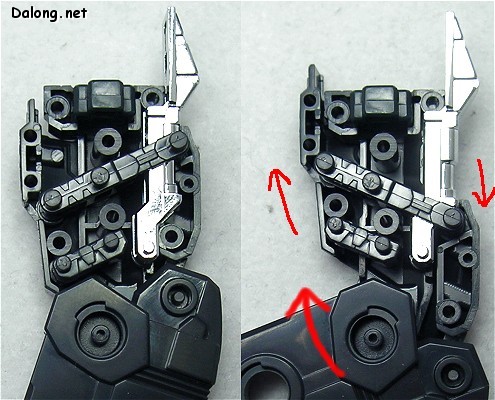
발목
앞쪽에도 작은 두 개의 실린더가 있습니다.
발목이
양쪽으로 꺽일 때, 종아리 양쪽에 힘줄(?)같은 부위가 연동됩니다.
건프라를
만진이래 처음보는, 정말 굉장히 감탄스러운 가동기믹입니다만,
사진상에선 잘 감흥이 안오는군요.
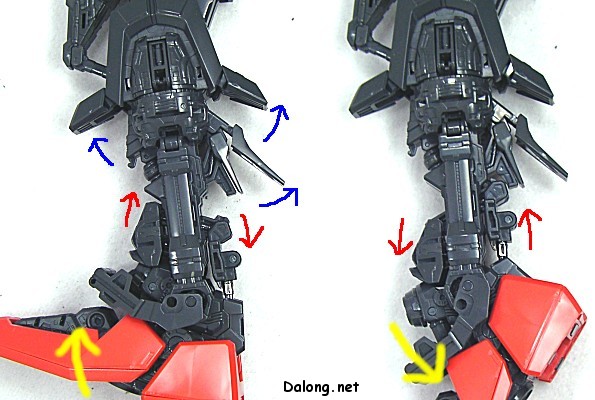
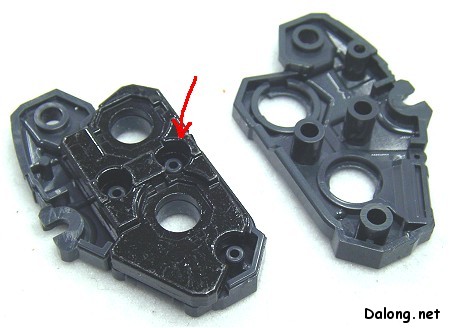
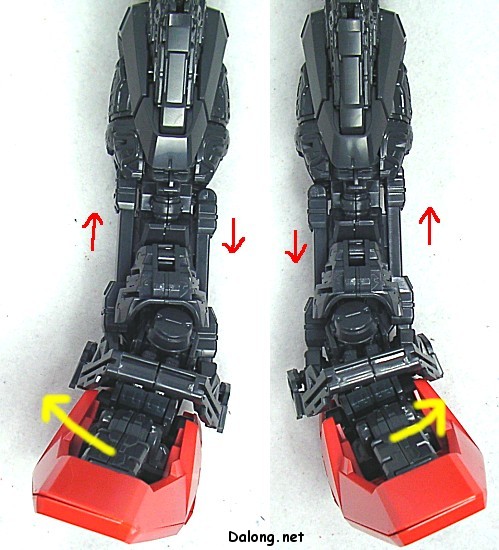
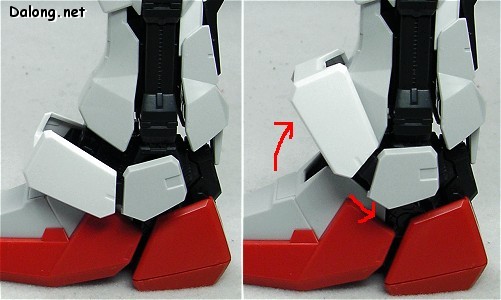
발목을
앞뒤로 꺽을 때마다 앞뒤 내부 프레임 자체가 위 아래로 슬라이딩 됩니다.
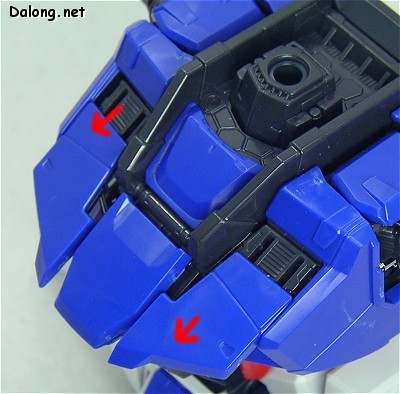
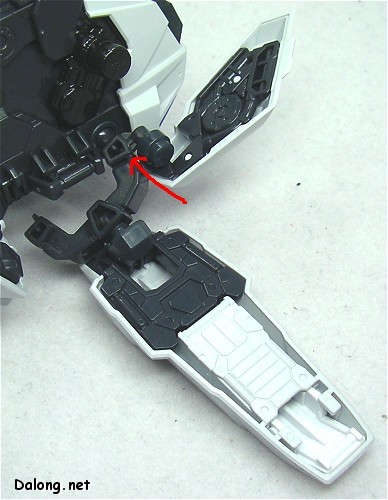
다리
뒷부분의 버니어부도 이중으로 가동되며,
무릎부분을 덮는 앞뒤
작은 장갑부분도 가동됩니다.(파란색 화살표 부분)
발목 한번 움직이면
앞뒤양옆 사방으로 근육이 움직이듯이 메카닉 프레임 자체가 자연스럽게
춤을 춥니다.
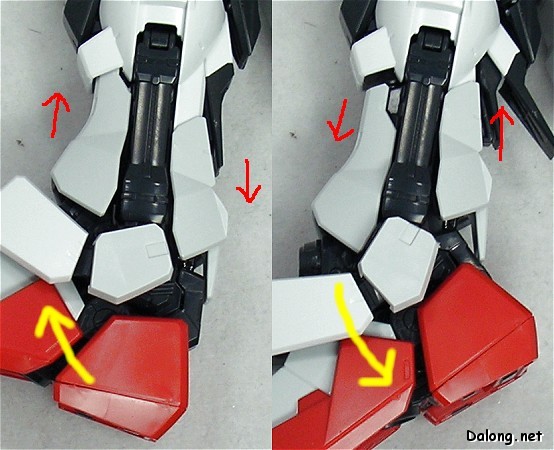
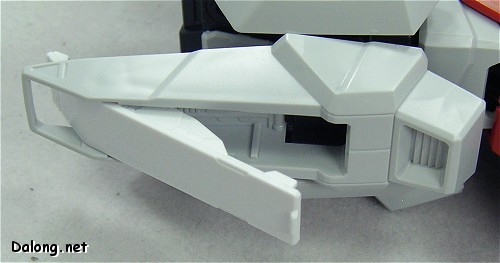
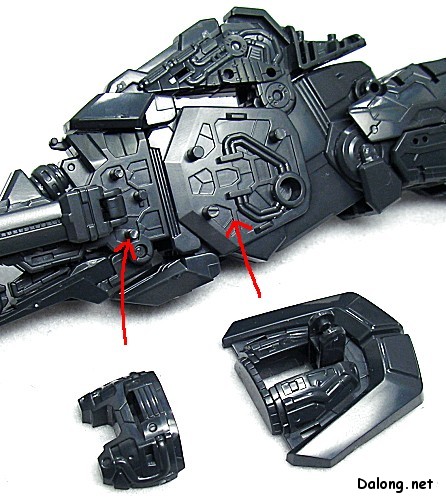
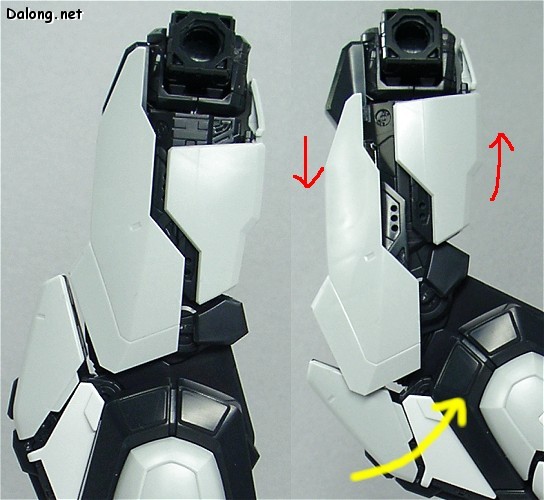
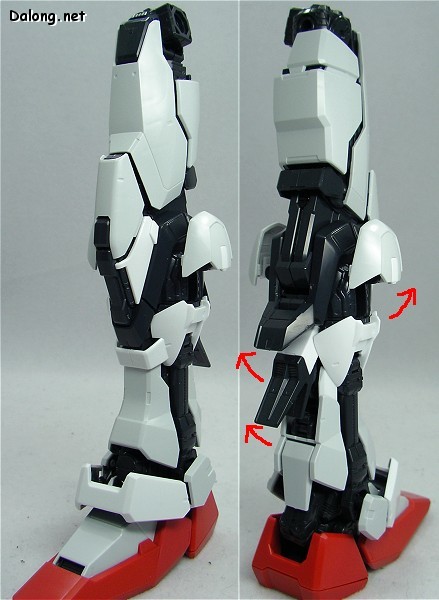
장갑을
입힌 상태에서 가동시켜 본 모습.
발목의 움직임에 따라 정강이
앞뒤의 장갑이 큰 범위로 움직임을 알 수 있습니다.
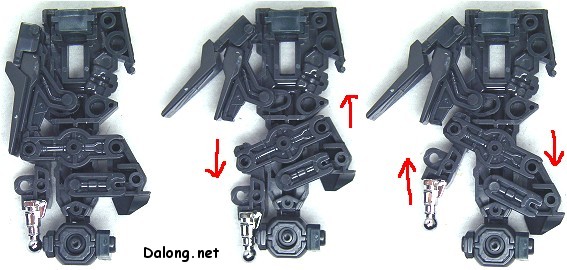
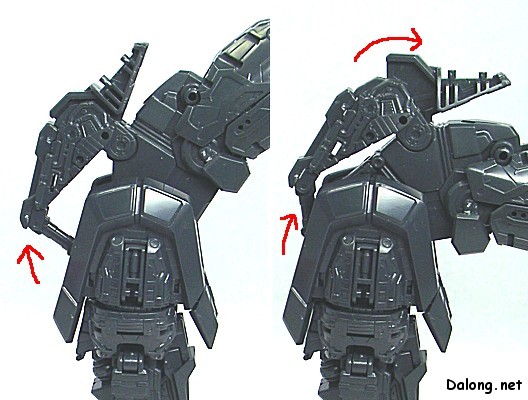
다리의
앞뒤의 가동기믹의 내부는 저런 메카니즘입니다. 앞뒤로 연동.
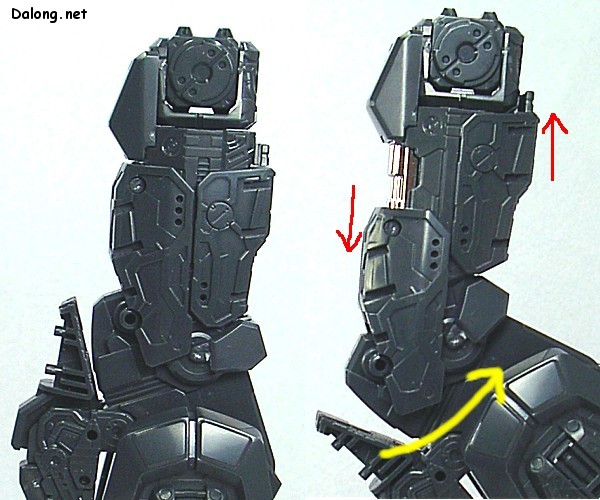
허벅지
슬라이드는 MG에서도 쓰이니까 별로 안 신기할지 모르지만,
PG 스트라이크는
한단계 더 앞서나갑니다. 외부 장갑이 움직이는게 아니라 내부 메카닉
프레임틀 전체가
슬라이드식으로 움직이며, 앞부분 뒷부분 장갑이
반대방향으로 크게 어긋나며 슬라이딩 됩니다.
그러한
허벅지 슬라이드의 내부 구조는 저런 이중 가동기믹으로 설명됩니다.
앞뒤가
반대로 교차하면서 슬라이딩.
장갑을
입힌 상태에서의 허벅지 슬라이드 기믹.
슬라이드 된 후에 내부의
메카닉 프레임이 잘 보입니다.
절묘한
무릎 가동. 4~5단계로 분할되어 조각조각 분리되며 접힙니다.
메카닉
프레임 상에서의 무릎 가동 장면. 무릎 자체도 자동으로 2단으로 분할되며
접힙니다.
발목
보호대도 큰 범위로 가동합니다. 발목보호대 자체가 앞은 순백색, 고정부는
연회색으로
색상도 다른데, 따로 따로 가동도 됩니다.

무릎보호대가
꽉 끼일정도로 발목이 화끈하게 접혀줍니다.
발목보호대가 가동성을
깎아먹지 않도록 무지 배려한 느낌이 듭니다.

무릎이
위아래로 따로 수평 회전이 됩니다만, 약 5도 정도밖에 안돕니다.
조금은
가동성에 도움이 되는 부분.
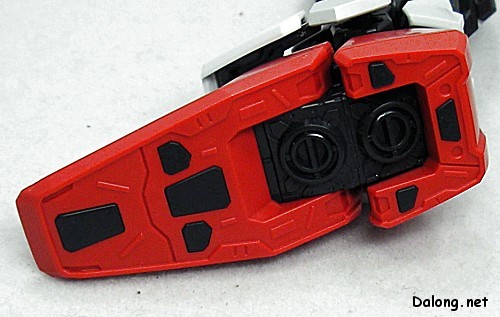
발바닥의
몰드.
해치
오픈은 무릎 옆부분밖에 안됩니다.
고도의 연동 가동기믹을 사용하다
보니 그런 듯 한데,
그나마 그 와중에 저기라도 오픈되게 구현된게
다행일지도.
정강이 뒤쪽의 슬라스터도 열리긴 합니다.

기본
무장인 쉴드, 빔라이플, 아머슈나이더와 함께 왕칼무기 그랜드 슬램이
들어있습니다.

쉴드의
부품도

패널라인이
굵어지고, 디테일이 섬세해졌습니다.

윗부분
하얀색이 살짝 뜨게 만들어진 것은 MG 에일과 같습니다.

방패끝의
노란부분은 안쪽까지 디테일을 살려줬습니다.
안쪽
몰드. 섬세합니다요.
손잡이
부는 위 아래로 수직 이동이 가능합니다.
쉴드
안쪽 위에는 PG 퍼스트 같은 유리 가리개가 있습니다.
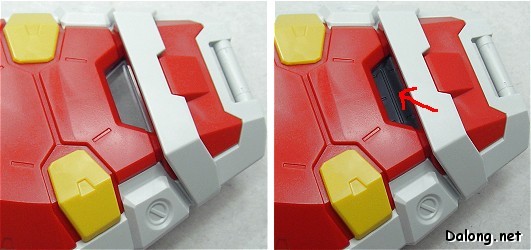
왼쪽이
개방상태, 오른쪽이 닫은 상태.
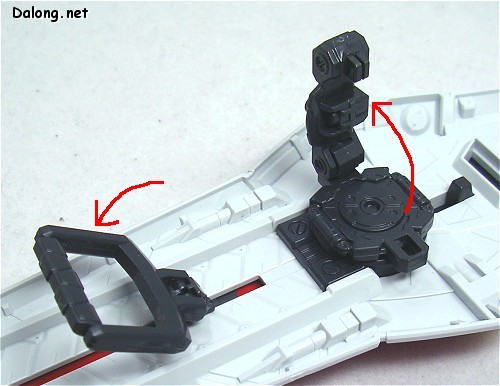
팔에
장착하기 위해선 고정부 부품을 떼어서 90도 세웁니다.
아래쪽 손잡이도
필요할 수 있습니다.
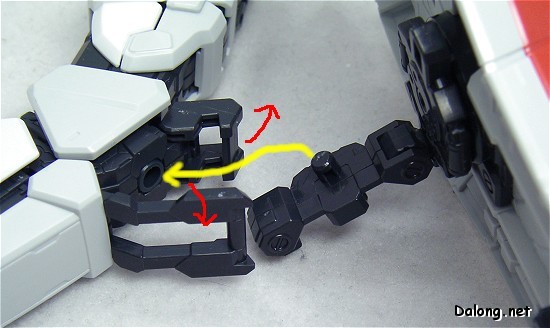
팔의
고리쇠 양쪽을 오픈한 다음, 쉴드의 돌기부분을 팔의 폴리캡 구멍에
끼웁니다.

그다음
팔의 고리쇠를 닫아 끼우면 딱~하고 잘 고정됩니다.
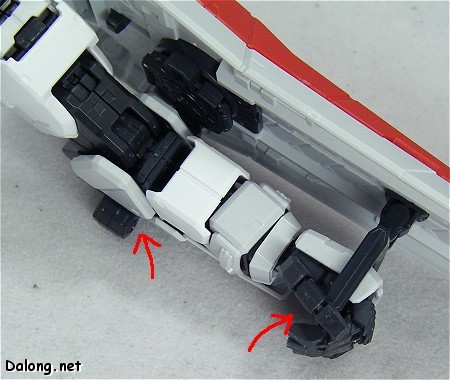
실제로
저렇게 팔 뒤쪽에서 쉴드를 연결하면 쉴드가 덜렁거리기 때문에 손잡이를
손으로 잡아야만 합니다.

아니면
그냥 돌려 끼워서 고리쇠 방향쪽에 고정해 버릴 수도 있습니다.
즉,
쉴드는 90도 방향으로 꺾어서 달 수 있으며, 적당히 상황에 맞추어 달아주면
됩니다.

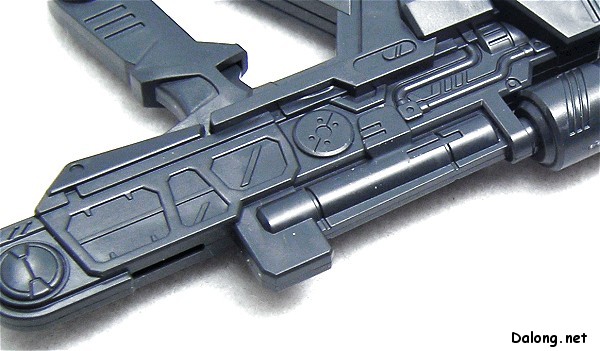
빔라이플
부품도


PG
다운 디테일이 살아있습니다.

빔라이플
자체는 여러 블록의 조합처럼 만들어져 있습니다.
라이플
뒤쪽의 내부 메카닉 프레임. 디테일 좋습니다~
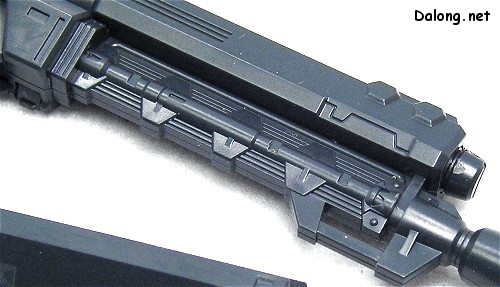
라이플
앞쪽의 내부 메카닉.

특이하게도,
빔라이플의 트리거(방아쇠)가 별도 부품으로 가동됩니다.
조금밖에
안움직이긴 한데 어쨌뜬 방아쇠까지 구현된 PG 라이플이라~
물론
PG의 손의 악력으로 방아쇠까지 당기진 못하고, 사람이 눌러야지나 들어갑니다.
그냥
사람이 재밌으라고 추가해준 기능인 듯 >.<

상부
조준경은 푸른 클리어 부품을 사용하여 더 멋지구리합니다.
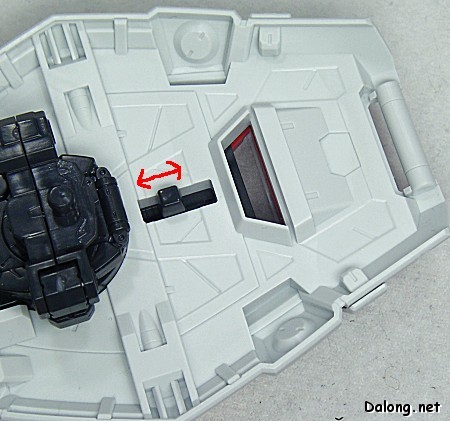
총신
옆에는 돌기는 빼낼 수가 있어서, 이것을 이용하여 궁뎅이에 라이플을
걸어둘 수도 있습니다.

부가적으로
달린 손잡이는 폴리캡에 의해 헐겁지 않고 튼튼하게 가동됩니다.
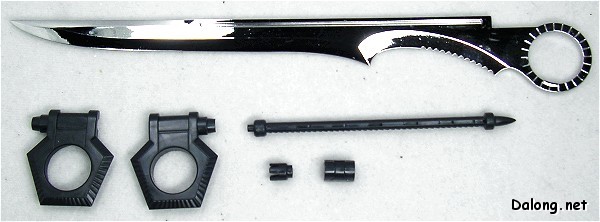
그랜드슬램
부품도.

쌩~뚱맞게도,
건담시드 캐릭터 디자이너(메카닉 디자이너가 아니라!) 의
오리지널
디자인 무장인 그랜드 슬램이 추가되어 있습니다.

크기는
35.5cm. 무지하게 기네요~

길다고
소문난 MG 퍼펙지옹의 왕칼도 쨉이 안되는 구먼요.

칼날이
진짜 칼같을 정도로 멕기 코팅이 잘되어 있습니다. 손이 베일 것 같습니다..

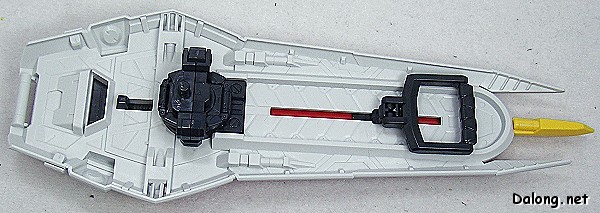
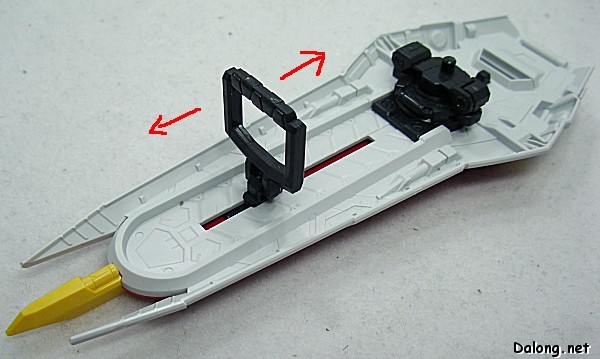
손잡이부

손잡이
부가 요상하게 변합니다.
칼부분이180도 회전이 가능하고, 길죽한
막대같은 부분도 위아래로 슬라이딩이 가능합니다.
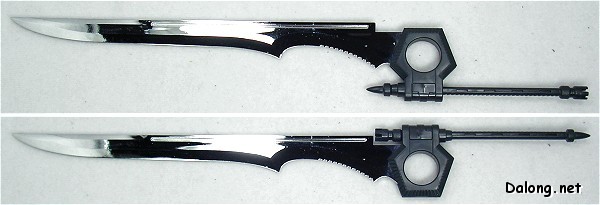
그래서
이렇게 두가지 형태의 손잡이 모양으로 구현이 가능합니다.
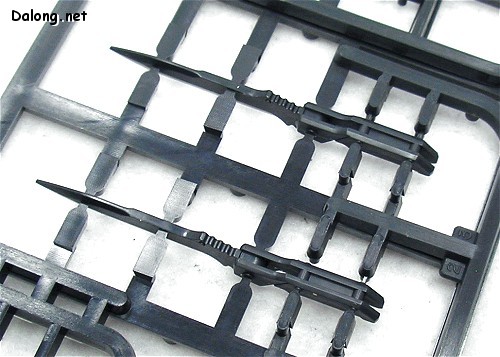
단도라
할 수 있는 아머 슈나이더는 엉뚱하게도 통짜부품으로 찍혀나와 있습니다.

통짜
부품 가동에 의해 칼접이 기능이 구현되지만..
굳이 이걸 비싼 통짜부품으로
찍어야 할 이유가 있었을까요??
차라리 부품분할해서 칼부분은 멕기나
은색으로 설정에 맞게 해주는게 나았을 듯 한데,
뭐하러 설정색 구현까지
포기해가면서 통짜부품으로 설계한 저의가 무엇이다냐.